Suite à l’échec de mon dernier projet robot, que vous n’avez pas vu ici, j’ai décidé pour mon troisième d’être sûr qu’il roulera. En effet le précédent refuse obstinément d’avancer (je vous mettrai une vidéo si vous voulez).
Donc pour ce K-9, j’ai décidé de le faire rouler sur chenilles.
K-9 est le chien robot qu’on voit dans Doctor Who et il est très attachant. Il ressemble à ça :

Voici donc la construction du chassis :

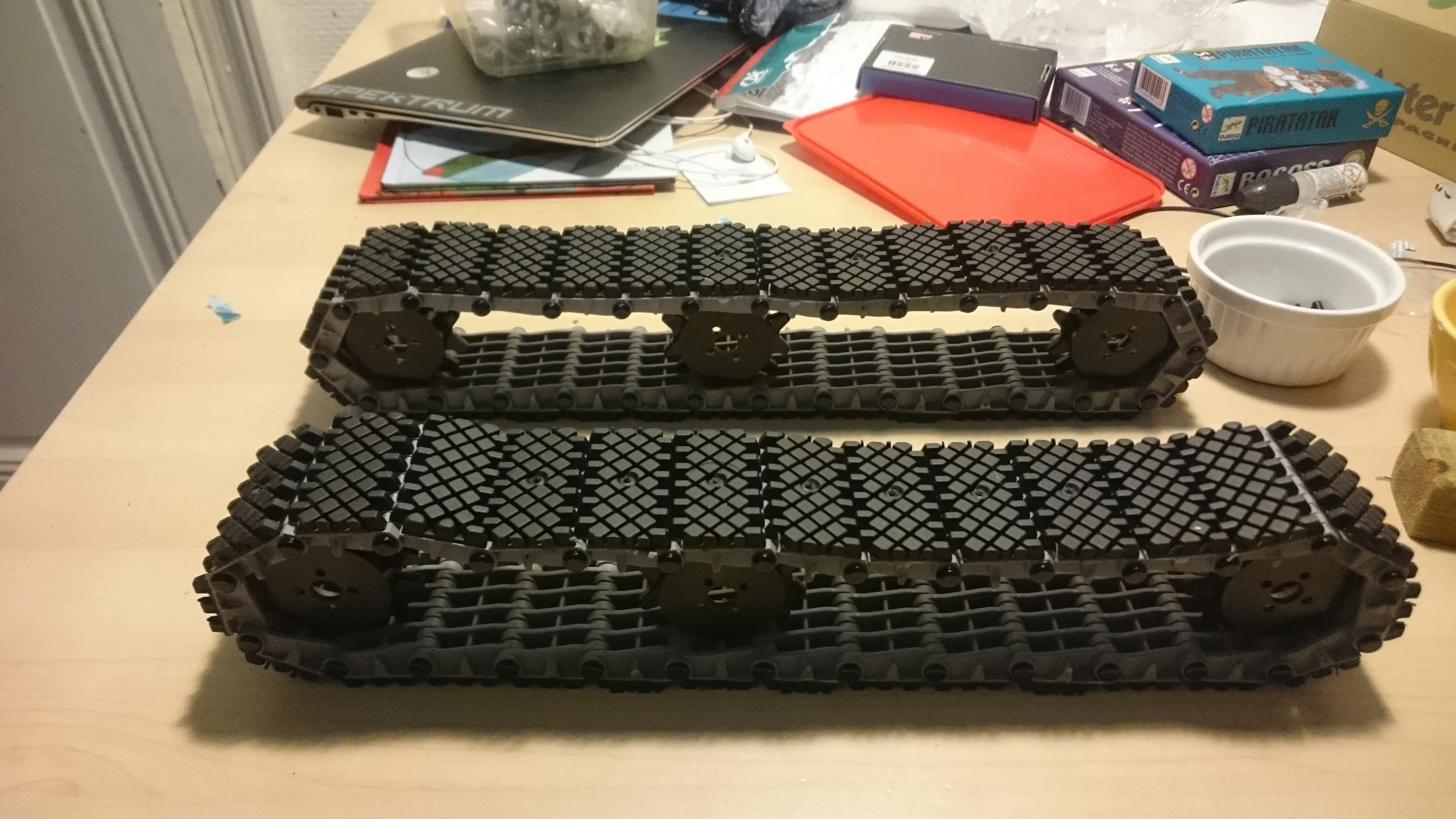
Les chenilles font cinq centimètres de large et seront posées sur trois axes :
J’ai récupéré des vieux profilés en alu de portes-fenêtres dans la poubelle du voisin de bureau, qui vend des portails et des fenêtres.

L’avantage de l’alu c’est que c’est rigide et léger. Les moteurs y sont bien solidarisés et ça ne devrait pas bouger.


J’ai ensuite relié les deux profilés intérieurs avec une plaque de contreplaqué et ajouté un « pont ».
Le pont me permettra de mettre la batterie dedans, et d’avoir plus de place pour l’électronique sur le dessus.

Une fois la base du chassis prête, j’ai commencé à y greffer l’électronique. Pour l’instant il s’agit d’un robot bien standard avec deux moteurs, un Arduino, un contrôleur de moteur et un récepteur RC de modélisme.

J’ai fait de belles nappes car j’avais prévu pas mal de fonctions à câbler, et je n’avais pas envie que ce soit trop affreux.
Le début du montage que l’on voit ici comprend la partie radio-commande et tous les petits trucs habituels que j’utilise pour mes robots : un convertisseur de tension DC-DC pour avoir un rail d’alimentation en 5V à partir de la batterie (pour les petits servos, les LEDs, etc) et un rail en 7.4V directement de la batterie, donc à fort ampérage, pour le contrôleur de moteur et les servos puissants (celui du cou par exemple).
On y voit aussi un relais contrôlé par l’Arduino, ce qui lui permet d’interrompre son alimentation lorsque le robot perd le signal de la télécommande.

Voici le résultat en vidéo (trop longue désolé).
Je suis ensuite passé à l’armature du corps, puis de la tête (ce qui me plait beaucoup dans la robotique, c’est qu’on alterne les plaisirs : électronique, programmation, modélisme). J’ai fait l’armature du corps en contreplaqué de 10mm et celle de la tête en contreplaqué de 5mm.
Pour les proportions de K-9, j’ai trouvé les plans sur le site de DoctorWhoScarf, à priori la référence dans la communauté de builders, et je les ai adaptés à mes besoins.
Vu que le corps présente beaucoup d’angles, le plus simple pour les reporter sur le contreplaqué est d’ouvrir le PDF avec gimp, sélectionner les parties désirées et les imprimer à l’échelle voulue (sur plusieurs pages si nécessaire).

Il y a deux supports longitudinaux et trois supports latéraux. Comme d’habitude, pour un meilleur résultat, je ne trace qu’un de chaque et après la première découpe, je trace les suivants à partir du premier. Une fois tout découpé, j’ai aligné les pièces identiques, les ai vissées ensemble pour ne pas qu’elles bougent et j’ai poncé copieusement jusqu’à obtenir deux pièces (ou trois le cas échéant) strictement identiques.

Je les ai ensuite désolidarisées et les ai assemblées. (comme d’habitude, la colle vinylique est super pour le bois).

Voici ce que donne l’armature du corps de K-9 sur son chassis. Elle est posée en dix endroits (trois de chaque côté, plus deux à l’avant et à l’arrière des supports longitudinaux. Les six points de contact des côtés sont aimantés au chassis avec des aimants au néodyme, et les quatre intérieurs ont une vis qui en sort, qui permettent de positionner le tout pour que cela soit précisément posé.
Pour lier la tête au cou, j’ai utilisé du tuyau de cuivre que j’ai coupé et dans lequel j’ai fabriqué une encoche, de manière à ce que la tête soit facilement séparable.
La base est reliée à un servomoteur qui la fait tourner, et une vis la traverse pour que l’encoche de l’autre côté s’y cale.

Une autre vis empêche la base de sortir de son logement.

L’encoche a été faite en plusieurs épaisseurs de contreplaqué collé et poncé coniquement pour que l’alignement soit plus facile.

L’armature a été renforcée pour que la liaison par l’encoche ne subisse presque pas d’effort.

La tête a été assez compliquée à faire, car elle est pleine de courbes. Je ne me suis trompé que sur une pièce, j’étais assez content de moi. Il y a beaucoup d’encoches à faire et assez profondes, car les supports latéraux doivent passer dans l’intérieur des supports longitudinaux.

Voici les supports principaux assemblés à blanc, prêts à être collés.


Le collage en lui même. Tous les supports sont en place y compris les supports horizontaux, qui permettront d’avoir plus de surface encollable pour les côtés de la tête.
Un détail de l’assemblage du « nez-capteur » de K-9. Une espèce de ventouse située entre ses yeux et qui peut sortir de façon motorisée.
C’est toujours compliqué de transformer l’action radiale d’un servo en action linéaire, (et souvent cher). Ici, le très faible effort mécanique nécessaire m’a permis de me contenter de deux micros-servos à rotation continue, collés l’un à l’autre et dotés de rondelles en caoutchouc (il m’en reste 248, avis aux amateurs) entre lesquelles la tige métallique (un reste d’armature de garde-boue de vélo) est passée en friction. En faisant tourner les servos dans un sens chacun, on peut faire avancer ou reculer la tige.

J’ai préparé un système le plus petit possible et bien m’en a pris, car le tout est rentré au chausse pied dans la tête. Ici, on peut aussi voir un des micros-servos qui serviront à faire pivoter les oreilles.

Ça donne ça :
Zoom sur les butées de fin de course :
Une vue du tout, avec le début du travail de câblage.

Pour simplifier la maintenance et pour la beauté du geste, je voulais pouvoir assembler et désassembler facilement le tout. J’ai trouvé des prises 10 broches qui m’ont permis de n’avoir qu’un câble pour toute la tête. J’avais en effet besoin de huit broches : le +5V, la masse, deux datas pour les servos du nez, deux pour les servos des oreilles, deux pour les micro-interrupteur de butées pour le nez-capteur. Chaque servo et LED partagent la même alimentation, le tout étant câblé soudé sur une petite carte de prototypage.

Et voici K-9 en mode Terminator, avec toute son armature terminée.

En vidéo ? Vos désirs sont des ordres.
Je suis donc passé à sa « carrosserie ». La règle d’or : couper trop large, et poncer ce qui dépasse. Sinon on perd de grandes surfaces de contreplaqué pour un détail trop bête, et le contreplaqué peuplier de modélisme, c’est la peau des fesses : 11€ la planche de 100x50cm.
J’ai fait les panneaux du corps en 2mm sauf celui du haut, qui est bombé, pour lequel j’ai utilisé du 1.5mm – comme pour la tête. J’ai commencé par le bas et continué en montant. Là encore, pas de mesures, il vaut mieux positionner l’armature sur la plaque de contreplaqué à découper et reporter la réalité.


Premiers panneaux collés :
Tous les panneaux sont posés, il ne reste qu’à poncer.


Pour la tête, pareil. Ça a pris du temps, car il fallait que chaque panneau sèche avant de mettre le suivant. J’ai commencé par les panneaux latéraux et continué par le reste.
Voici la tête, complète et poncée. Il commence à ressembler à quelque chose !

Il restait à préparer le panneau dorsal :

Mon K-9 étant plus petit que l’original, j’ai pris des libertés avec ses boutons du panneau dorsal et il n’en aura que trois rangées de trois au lieu de rangées de quatre. Plus les deux gros en haut.

J’ai câblé les diodes sur quatre circuits différents (les deux du haut seront toujours allumées, tandis que les autres clignoteront deux par deux au hasard).


Une fois tout prêt puis collé, j’ai installé le tout dans le corps, puis câblé les prises (idem que pour la tête, je veux pouvoir enlever le corps du chassis. Ici j’ai eu besoin de 7 broches : le +5V (pour le servo de queue et les LEDs du haut du panneau), la masse (pour tout le monde), et cinq datas (pour le servo et les 4 circuits de LEDs à faire clignoter).
Ensuite, j’ai préparé des petits boutons pour coller sur le panneau dorsal. Ils sont faits en contreplaqué de 2mm, évidés au centre (ça fait beaucoup de découpes à faire mais ça fait partie du fun), et collés dessus, des morceaux de plastique translucide. Un ou deux Tupperware ont souffert à cette étape. Le Tupperware étant en polypropylène, notoirement difficile à coller, j’ai fait des test comparatifs sur des chutes avec : colle vinylique, colle E6000, SuperGlue et epoxy bi-composant. L’epoxy gagne haut la main.

Voici le résultat du travail électronique du corps :

Puis j’ai peint le tout.
J’ai fait les oreilles avec du fil d’acier d’1.5mm (Leroy Merlin) et de la moustiquaire (Leroy-Merlin). Je voulais de la moustiquaire métallique pour souder le tout, mais personne n’a ça, donc j’ai fini avec de la moustiquaire PVC et j’ai epoxysé le tout.

Enfin, le dernier détail restant est le collier. Il est fait avec deux bandes de contreplaqué 1.5 collées l’une à l’autre et recouvertes de tissu. Il faut y aller doucement pour l’arrondi, et surtout découper dans le sens inverse des fibres pour plus de souplesse.

Je n’avais pas de bonne idée de sourçage de tissu écossais, et un soir ma chérie est rentrée avec une chemise taille trois ans, dégottée chez Emmaüs, avec un motif parfait ! Je l’ai donc découpée et sacrifiée pour une demi-heure de couture (durant laquelle j’étais moins dans mon élément que jusqu’ici, mais je m’en suis sorti tout seul !

Et voilà, K-9 est prêt :)




excellent ! bravo ! on ne se connait pas, je m’étais abonné a tes « news » suite à la boite inutile que j’avais construite (et qui reste toujours un objet d’adoration pour mon fils et mes amis !)
par contre faudra me ranger cette chaussette sous la bibliothèque ! ;-)
Merci Eric ! Oui, les robots inutiles, ça fait toujours son effet, le mien est au bureau et mes collègues jouent avec régulièrement quand ils passent à mon bureau :)
Sérieux j’ai pas de mot… Juste bravo le rendu est parfait ! :-)
Thanks Sylvain :)